turtlesim, ros2, 그리고 rqt 사용하기#
배경#
Turtlesim은 ROS 2 학습을 위한 경량 시뮬레이터입니다. ROS 2가 가장 기본적인 수준에서 수행하는 작업을 보여주어 나중에 실제 로봇이나 로봇 시뮬레이션에서 수행할 작업에 대한 아이디어를 제공합니다.
ros2 도구는 사용자가 ROS 시스템을 관리, 검사 및 상호 작용하는 방법입니다. 시스템의 다양한 측면과 작동을 대상으로 하는 여러 명령을 지원합니다. 노드 시작, 매개변수 설정, 주제 수신 등 많은 작업에 사용할 수 있습니다. ros2 도구는 핵심 ROS 2 설치의 일부입니다.
rqt는 ROS 2용 그래픽 사용자 인터페이스(GUI) 도구입니다. rqt에서 수행되는 모든 작업은 명령줄에서 수행할 수 있지만, rqt는 ROS 2 요소를 조작하는 더 사용자 친화적인 방법을 제공합니다.
이 튜토리얼에서는 노드, 주제 및 서비스와 같은 핵심 ROS 2 개념을 다룹니다. 이러한 모든 개념은 이후 튜토리얼에서 자세히 설명될 것입니다. 지금은 도구를 설정하고 사용 감각을 익히는 것이 전부입니다.
작업#
1. turtlesim 설치#
항상 그렇듯이 이전 튜토리얼에 설명된 대로 새 터미널에서 설정 파일을 소싱하는 것으로 시작합니다.
ROS 2 배포판용 turtlesim 패키지를 설치합니다:
sudo apt update
sudo apt install ros-{DISTRO}-turtlesim
ROS 2를 설치한 아카이브에 ros_tutorials 저장소가 포함되어 있다면 turtlesim이 이미 설치되어 있어야 합니다.
ROS 2를 설치한 아카이브에 ros_tutorials 저장소가 포함되어 있다면 turtlesim이 이미 설치되어 있어야 합니다.
패키지가 설치되었는지 확인합니다:
ros2 pkg executables turtlesim
위 명령은 turtlesim의 실행 파일 목록을 반환해야 합니다:
turtlesim draw_square
turtlesim mimic
turtlesim turtle_teleop_key
turtlesim turtlesim_node
2. turtlesim 시작#
turtlesim을 시작하려면 터미널에 다음 명령을 입력합니다:
ros2 run turtlesim turtlesim_node
시뮬레이터 창이 나타나고 가운데에 랜덤한 거북이가 보일 것입니다.
터미널에서 명령 아래에 노드의 메시지가 표시됩니다:
[INFO] [turtlesim]: Starting turtlesim with node name /turtlesim
[INFO] [turtlesim]: Spawning turtle [turtle1] at x=[5.544445], y=[5.544445], theta=[0.000000]
여기에서 기본 거북이의 이름과 생성되는 좌표를 볼 수 있습니다.
3. turtlesim 사용#
새 터미널을 열고 ROS 2를 다시 소싱합니다.
이제 첫 번째 노드의 거북이를 제어할 새 노드를 실행합니다:
ros2 run turtlesim turtle_teleop_key
이 시점에서 turtlesim_node를 실행하는 터미널, turtle_teleop_key를 실행하는 터미널, turtlesim 창 등 세 개의 창이 열려 있어야 합니다. turtlesim 창을 볼 수 있지만 turtle_teleop_key를 실행하는 터미널도 활성화하여 turtlesim에서 거북이를 제어할 수 있도록 이러한 창을 정렬하세요.
키보드의 화살표 키를 사용하여 거북이를 제어하세요. 거북이가 화면 주위를 움직이며 연결된 “펜”을 사용하여 지금까지 이동한 경로를 그릴 것입니다.
.. note:: 화살표 키를 누르면 거북이가 짧은 거리만 이동하고 멈춥니다. 이는 실제로 운영자가 로봇과의 연결을 잃은 경우와 같이 로봇이 계속 명령을 수행하는 것을 원하지 않기 때문입니다.
각 명령의 list 하위 명령을 사용하여 노드 및 관련 주제, 서비스, 액션을 볼 수 있습니다:
ros2 node list
ros2 topic list
ros2 service list
ros2 action list
다가오는 튜토리얼에서 이러한 개념에 대해 자세히 배우게 될 것입니다. 이 튜토리얼의 목표는 turtlesim에 대한 일반적인 개요를 제공하는 것뿐이므로 rqt를 사용하여 일부 turtlesim 서비스를 호출하고 turtlesim_node와 상호 작용할 것입니다.
4. rqt 설치#
rqt 및 해당 플러그인을 설치하려면 새 터미널을 엽니다:
sudo apt update
sudo apt install ~nros-{DISTRO}-rqt*
sudo dnf install ros-{DISTRO}-rqt*
macOS용 ROS 2 설치 표준 아카이브에는 rqt 및 해당 플러그인이 포함되어 있으므로 rqt가 이미 설치되어 있어야 합니다.
Windows용 ROS 2 설치 표준 아카이브에는 rqt 및 해당 플러그인이 포함되어 있으므로 rqt가 이미 설치되어 있어야 합니다.
rqt를 실행하려면:
rqt
5. rqt 사용#
rqt를 처음 실행하면 창이 비어 있습니다. 걱정하지 마세요. 상단 메뉴 모음에서 Plugins > Services > Service Caller를 선택하기만 하면 됩니다.
.. note::
rqt가 모든 플러그인을 찾는 데 시간이 걸릴 수 있습니다. Plugins를 클릭했지만 Services 또는 다른 옵션이 보이지 않는 경우 rqt를 닫고 터미널에 rqt --force-discover 명령을 입력해야 합니다.

turtlesim 노드의 모든 서비스를 사용할 수 있는지 확인하려면 Service 드롭다운 목록 왼쪽에 있는 새로 고침 버튼을 사용하세요.
Service 드롭다운 목록을 클릭하여 turtlesim의 서비스를 확인하고 /spawn 서비스를 선택하세요.
5.1 spawn 서비스 사용해 보기#
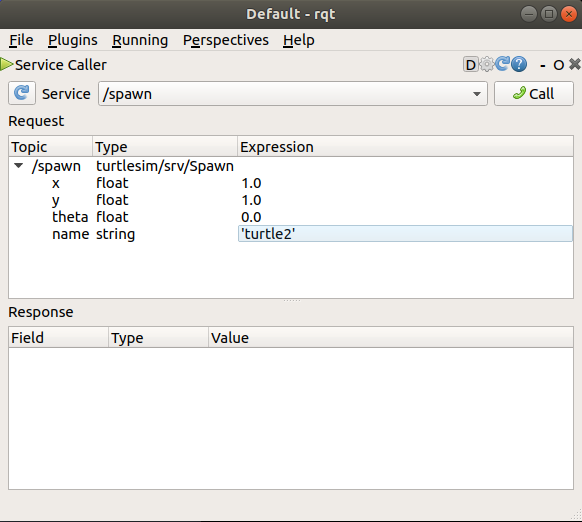
rqt를 사용하여 /spawn 서비스를 호출해 보겠습니다. /spawn의 이름에서 유추할 수 있듯이 /spawn은 turtlesim 창에 또 다른 거북이를 생성합니다.
Expression 열의 빈 작은따옴표 사이를 두 번 클릭하여 새 거북이에 turtle2와 같은 고유한 이름을 지정하세요. 이 표현식이 name의 값에 해당하고 string 유형임을 알 수 있습니다.
그 다음 새 거북이를 생성할 유효한 좌표를 입력하세요(예: x = 1.0, y = 1.0).
.. note::
기본 turtle1과 같은 기존 거북이와 동일한 이름으로 새 거북이를 생성하려고 하면 turtlesim_node를 실행하는 터미널에 다음과 같은 오류 메시지가 표시됩니다:
[ERROR] [turtlesim]: A turtle named [turtle1] already exists
turtle2를 생성하려면 rqt 창 오른쪽 상단에 있는 Call 버튼을 클릭하여 서비스를 호출해야 합니다.
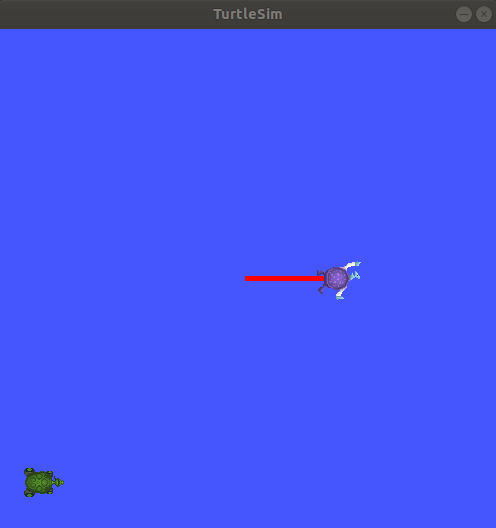
서비스 호출이 성공하면 x와 y에 입력한 좌표에서 새 거북이(다시 무작위 디자인)가 생성되는 것을 볼 수 있습니다.
rqt에서 서비스 목록을 새로 고치면 /turtle1/... 외에 새 거북이 /turtle2/...와 관련된 서비스도 있음을 알 수 있습니다.
5.2 set_pen 서비스 사용해 보기#
이제 /set_pen 서비스를 사용하여 turtle1에 고유한 펜을 제공해 보겠습니다:
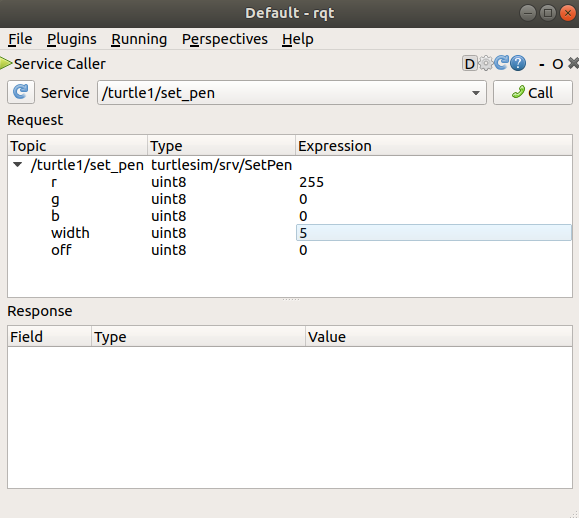
0에서 255 사이의 r, g, b 값은 turtle1이 그리는 펜의 색을 설정하고 width는 선의 두께를 설정합니다.
turtle1이 뚜렷한 빨간색 선으로 그리게 하려면 r 값을 255로, width 값을 5로 변경하세요. 값을 업데이트한 후 서비스를 호출하는 것을 잊지 마세요.
turtle_teleop_key가 실행 중인 터미널로 돌아가 화살표 키를 누르면 turtle1의 펜이 변경된 것을 볼 수 있습니다.
turtle2를 움직일 방법이 없다는 것도 아마 알아차렸을 것입니다. 그것은 turtle2에 대한 teleop 노드가 없기 때문입니다.
6. 리맵핑#
turtle2를 제어하려면 두 번째 teleop 노드가 필요합니다. 그러나 이전과 동일한 명령을 실행하려고 하면 이 명령도 turtle1을 제어한다는 것을 알 수 있습니다. 이 동작을 변경하는 방법은 cmd_vel 주제를 리맵핑하는 것입니다.
새 터미널에서 ROS 2를 소싱하고 다음을 실행합니다:
ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel
이제 이 터미널이 활성화되면 turtle2를 움직일 수 있고, turtle_teleop_key를 실행하는 다른 터미널이 활성화되면 turtle1을 움직일 수 있습니다.

7. turtlesim 닫기#
시뮬레이션을 중지하려면 turtlesim_node 터미널에서 Ctrl + C를 입력하고 turtle_teleop_key 터미널에서 q를 입력할 수 있습니다.
요약#
turtlesim과 rqt를 사용하는 것은 ROS 2의 핵심 개념을 배우는 좋은 방법입니다.